Wstęp:
DM420A to rodzaj dwufazowego hybrydowego sterownika silnika krokowego, którego napięcie zasilania wynosi od 12 V DC do 36 V DC.Jest przeznaczony do użytku z 2-fazowymi hybrydowymi silnikami krokowymi wszelkiego rodzaju o średnicy zewnętrznej od 20 mm do 42 mm i prądzie fazowym mniejszym niż 2,0 A.Obwód, który zastosowano, jest podobny do obwodu sterowania serwomechanizmem, który umożliwia płynną pracę silnika niemal bez hałasu i wibracji.Moment obrotowy Hordinga, gdy DM420A pracuje z dużą prędkością, jest również znacznie wyższy niż w przypadku innego sterownika dwufazowego, co więcej, dokładność pozycjonowania jest również wyższa.Jest szeroko stosowany w średnich i dużych urządzeniach do sterowania numerycznego, takich jak maszyna do wyginania, maszyna CNC i hafciarka komputerowa, maszyny pakujące i tak dalej.
Cechy:
l Wysoka wydajność, niska cena
l Sterowanie średnim prądem, 2-fazowy sinusoidalny napęd prądu wyjściowego
l Napięcie zasilania od 12VDC do 36VDC
l Optoizolowane wejścia/wyjścia sygnału
l Zabezpieczenie przed przepięciem, pod napięciem, nadmierną korektą, zabezpieczenie przed zwarciem fazowym
l Podział na 8 kanałów i automatyczna redukcja prądu spoczynkowego
l 8-kanałowe ustawienie wyjściowego prądu fazowego
l Terminal wejściowy poleceń offline
l Moment obrotowy silnika jest powiązany z prędkością, ale nie z krokiem/obrotem
l Wysoka prędkość początkowa
l Wysoki moment obrotowy przy dużej prędkości
Specyfikacja elektryczna:
| Napięcie wejściowe | 12-36 V prądu stałego |
| Prąd wejściowy | < 2A |
| Prąd wyjściowy | 0,44A-2,83A |
| Konsumpcja | Konsumpcja:40 W; |
| Temperatura | Temperatura pracy -10 ~ 45 ℃; Temperatura przechowywania -40 ℃ ~ 70 ℃ |
| Wilgotność | Brak kondensacji, brak kropelek wody |
| gaz | Zakaz gazów palnych i pyłów przewodzących |
| waga | 70G |
Przypisanie pinów i opis:
1) Konfiguracje styków złącza
| Funkcja pinu | Detale |
| PUL +, PUL- | Sygnał impulsowy, PUL+ to dodatni koniec pinu wejściowego impulsów, PUL- to ujemny koniec pinu wejścia impulsowego |
| DIR+,DIR- | Sygnał DIR: DIR+ to dodatni koniec pinu wejściowego kierunku.DIR- to ujemny koniec pinu wejściowego kierunku |
| ENBL+ | Sygnał włączenia: ENBL+ to dodatni koniec pinu wejściowego kierunku.Sygnał ten służy do włączania/wyłączania sterownika.Wysoki poziom włączania sterownika i niski poziom wyłączania sterownika. |
| ENBL- | ENBL- jest ujemnym końcem pinu wejściowego kierunku.Zwykle pozostaje niepodłączony (włączony) |
2) Schemat podłączenia pinów:
Sygnały sterujące komputera PC mogą być aktywne przy wysokim i niskim poziomie elektrycznym.Kiedy wysoki poziom elektryczny jest aktywny, wszystkie ujemne sygnały sterujące zostaną połączone razem z GND.Gdy aktywny jest niski poziom elektryczny, wszystkie dodatnie sygnały sterujące zostaną połączone razem do portu publicznego.Podaj teraz dwa przykłady (Open Collector i PNP), sprawdź je:

Rys. 1. Obwód portu wejściowego (połączenie dodatnie)
Wyjście otwartego złącza komputera
Rys. 2 Obwód portu wejściowego (połączenie ujemne)
Wyjście PC PNP
Uwaga: Gdy VCC=5V, R=0
Gdy VCC=12V, R=1K, >1/8W
Gdy VCC=24V, R=2K,>1/8W
R musi być podłączony do części sygnału sterującego.
3. Wybór funkcji (użycie pinów DIP w celu osiągnięcia tej funkcji)
1) Rozdzielczość mikrokrokową ustawia się za pomocą SW 5,6,7,8 przełącznika DIP, jak pokazano w poniższej tabeli:
| SW5 | ON | WYŁĄCZONY | ON | WYŁĄCZONY | ON | WYŁĄCZONY | ON | WYŁĄCZONY |
| SW6 | ON | ON | WYŁĄCZONY | WYŁĄCZONY | ON | ON | WYŁĄCZONY | WYŁĄCZONY |
| SW7 | ON | ON | ON | ON | WYŁĄCZONY | WYŁĄCZONY | WYŁĄCZONY | WYŁĄCZONY |
| Impuls/obr | 200 | 400 | 800 | 1600 | 3200 | 6400 | 12800 | 25600 |
| Mikro | 1 | 2 | 4 | 8 | 16 | 32 | 64 | 128 |
2) Ustawienie prądu postojowego
Do tego celu służy SW4.WYŁ. oznacza, że prąd spoczynkowy jest ustawiony na połowę wybranego prądu dynamicznego i WŁ., co oznacza, że prąd postoju jest ustawiony na wartość wybranego prądu dynamicznego.
3) Ustawienie prądu wyjściowego:
Pierwsze trzy bity (SW 1, 2, 3) przełącznika DIP służą do ustawiania prądu dynamicznego.Wybierz ustawienie
Najbliższy wymaganemu prądowi silnika
| SW1 | SW2 | SW3 | SZCZYT | RMS |
| ON | ON | ON | 0,44 A | 0,31 A |
| WYŁĄCZONY | ON | ON | 0,62 A | 0,44 A |
| ON | WYŁĄCZONY | ON | 0,74 A | 0,52 A |
| WYŁĄCZONY | WYŁĄCZONY | ON | 0,86 A | 0,61 A |
| ON | ON | WYŁĄCZONY | 1,46 A | 1,03 A |
| WYŁĄCZONY | ON | WYŁĄCZONY | 1,69 A | 1,20 A |
| ON | WYŁĄCZONY | WYŁĄCZONY | 2,14 A | 1,51 A |
| WYŁĄCZONY | WYŁĄCZONY | WYŁĄCZONY | 2,83 A | 2,00 A |
4) Funkcja półprzepływu:
Funkcja półprzepływu polega na tym, że po 200 ms nie ma impulsu krokowego, prąd wyjściowy sterownika jest automatycznie zmniejszany do 40% znamionowego prądu wyjściowego, co zapobiega nagrzewaniu się silnika.
4. Styki silnika i zasilania:
| Styki silnika i zasilania | 1 | A+ | Okablowanie silników | |
| 2 | A- | |||
| 3 | B+ | |||
| 4 | B- | |||
| 5,6 | DC+ DC- | Zasilacz | Zasilanie: DC12-36VDC Szczytowy prąd wejściowy nie może przekraczać 2A |
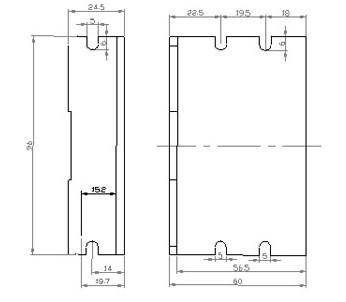
5. Specyfikacja mechaniczna:
Aby zachować wokół 20 mm wolnej przestrzeni, nie można go umieszczać obok innych urządzeń grzewczych.Co więcej, należy unikać kurzu, mgły olejowej, żrącego gazu, dużej wilgotności i wysokich wibracji.(Jednostka=mm)
6. Regulacja rozwiązywania problemów
1) , stan sygnalizacji świetlnej
PWR: zielone, normalne światło robocze.
ALM: czerwona, kontrolka awarii, silnik z zabezpieczeniem przed zwarciem fazowym, przepięciem i zbyt niskim napięciem.
2) Kłopoty
| Wskaźnik alarmu | Powody | Środki |
| Wyłączenie diody LED | Błędne podłączenie zasilania | Sprawdź okablowanie zasilania |
| Niskie napięcie zasilania | Zwiększ napięcie zasilania | |
| Silnik nie pracuje, nie utrzymuje momentu obrotowego | Błędne podłączenie silnika krokowego | Popraw jego okablowanie |
| Sygnał RESET działa w trybie offline | Spraw, aby RESET był nieskuteczny | |
| Silnik nie pracuje, ale utrzymuje moment trzymania | Bez wejściowego sygnału impulsowego | Dostosuj PMW i poziom sygnału |
| Silnik pracuje w złym kierunku | Nieprawidłowe podłączenie przewodów | Zmień połączenie dowolnego z 2 przewodów |
| Zły wejściowy sygnał kierunkowy | Zmień ustawienie kierunku | |
| Moment trzymania silnika jest za mały | Za mały w stosunku do bieżącego ustawienia | Prawidłowe ustawienie prądu znamionowego |
| Przyspieszenie jest zbyt szybkie | Zmniejsz przyspieszenie | |
| Zatrzymanie silnika | Wyklucz awarię mechaniczną | |
| Sterownik nie pasuje do silnika | Zmień odpowiedni sterownik |
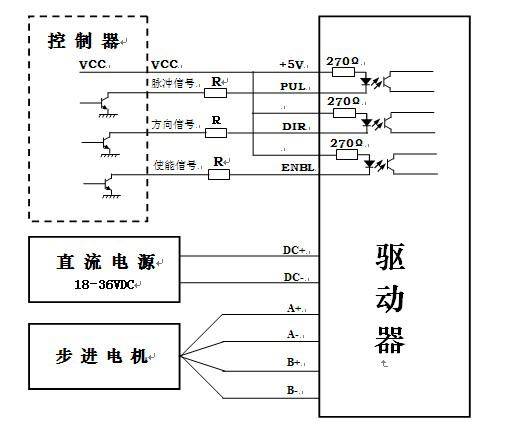
7. Okablowanie sterownika
Kompletny układ sterowania silnikiem krokowym powinien zawierać napędy krokowe, zasilacz prądu stałego oraz sterownik (źródło impulsów).Poniżej znajduje się typowy schemat okablowania systemu