Оршил:
DM420A нь 12VDC-ээс 36VDC хүртэлх хүчдэл бүхий хоёр фазын гибрид хөдөлгүүрийн драйвер юм.Энэ нь 20мм-ээс 42мм-ийн гадна диаметртэй, 2.0А-аас бага фазын гүйдэл бүхий бүх төрлийн 2 фазын гибрид гибрид мотортой ажиллахад зориулагдсан.Энэ хэлхээ нь моторыг дуу чимээ, чичиргээгүйгээр бараг жигд ажиллуулах боломжийг олгодог серво удирдлагын хэлхээтэй төстэй юм.DM420A өндөр хурдтай ажиллах үед эргүүлэх момент нь бусад хоёр фазын драйвераас хамаагүй өндөр байдаг бөгөөд үүнээс гадна байршлын нарийвчлал нь бас өндөр байдаг.Энэ нь муруй машин, CNC машин, компьютерийн хатгамал машин, баглаа боодлын машин гэх мэт дунд болон том хэмжээтэй тоон хяналтын төхөөрөмжүүдэд өргөн хэрэглэгддэг.
Онцлогууд:
l Өндөр гүйцэтгэл, хямд үнэ
l Дундаж гүйдлийн хяналт, 2 фазын синусоид гаралтын гүйдлийн хөтөч
l 12VDC-аас 36VDC хүртэл тэжээлийн хүчдэл
l Опто тусгаарлагдсан дохио I/O
l Хэт хүчдэл, бага хүчдэл, хэт залруулга, фазын богино залгааны хамгаалалт
l 8 сувгийн дэд хэсэг ба сул зогсолтын гүйдлийг автоматаар бууруулах
l 8 суваг гаралтын фазын гүйдлийн тохиргоо
l Офлайн тушаал оруулах терминал
l Моторын эргэлт нь хурдтай холбоотой боловч алхам/хувьсгалтай холбоогүй
l Өндөр эхлэх хурд
l Өндөр хурдны дор өндөр хүчлэх момент
Цахилгааны үзүүлэлт:
| Оролтын хүчдэл | 12-36VDC |
| Оролтын гүйдэл | < 2А |
| Гаралтын гүйдэл | 0.44A- 2.83A |
| Хэрэглээ | Хэрэглээ:40W; |
| Температур | Ажлын температур -10~45℃;Оросны температур -40℃~70℃ |
| Чийгшил | Конденсац биш, усны дусал байхгүй |
| хий | Шатамхай хий, дамжуулагч тоосыг хориглох |
| жин | 70 гр |
Pin-ийн даалгавар ба тайлбар:
1) Холбогч тээглүүрүүдийн тохиргоо
| Pin функц | Дэлгэрэнгүй мэдээлэл |
| PUL +, PUL- | Импульсийн дохио, PUL+ нь импульсийн оролтын эерэг төгсгөл PUL- импульсийн оролтын зүүний сөрөг төгсгөл |
| DIR+,DIR- | DIR дохио: DIR+ нь чиглэлийн оролтын pin-ийн эерэг төгсгөлDIR- чиглэлийн оролтын голын сөрөг төгсгөл юм |
| ENBL+ | Дохио идэвхжүүлэх: ENBL+ нь чиглэлийн оролтын зүүний эерэг төгсгөл юм.Энэ дохио нь драйверийг идэвхжүүлэх/идэвхгүй болгоход ашиглагддаг.Драйверыг идэвхжүүлэх өндөр түвшин, жолоочийг идэвхгүй болгох доод түвшин. |
| ENBL- | ENBL- нь чиглэлийн оролтын голын сөрөг төгсгөл юм.Ихэвчлэн холболтгүй орхидог (идэвхжүүлсэн) |
2) зүү холболтын диаграм:
Компьютерийн хяналтын дохио нь цахилгааны өндөр болон бага түвшинд идэвхтэй байж болно.Өндөр цахилгаан түвшин идэвхтэй байх үед бүх хяналтын сөрөг дохио GND-д холбогдоно.Бага цахилгааны түвшин идэвхтэй үед хяналтын бүх эерэг дохиог нийтийн порт руу холбоно.Одоо хоёр жишээ өг (Нээлттэй цуглуулагч & PNP), тэдгээрийг шалгана уу:

Зураг 1. Оролтын портын хэлхээ (Эерэг холболт)
PC-ийн нээлттэй холбогч гаралт
Зураг 2 Оролтын портын хэлхээ ( Сөрөг холболт)
Компьютерийн PNP гаралт
Тайлбар: VCC=5V үед R=0
VCC=12V, R=1K, >1/8W үед
VCC=24V, R=2K,>1/8W үед
R нь хяналтын дохионы хэсэгт холбогдох ёстой.
3.Функцийн сонголт (Энэ функцэд хүрэхийн тулд DIP зүү ашиглах)
1) Бичил алхамын нарийвчлалыг дараах хүснэгтэд үзүүлсний дагуу DIP шилжүүлэгчийн SW 5,6,7,8-аар тохируулна.
| SW5 | ON | Унтраах | ON | Унтраах | ON | Унтраах | ON | Унтраах |
| SW6 | ON | ON | Унтраах | Унтраах | ON | ON | Унтраах | Унтраах |
| SW7 | ON | ON | ON | ON | Унтраах | Унтраах | Унтраах | Унтраах |
| Пульс/эргэлт | 200 | 400 | 800 | 1600 | 3200 | 6400 | 12800 | 25600 |
| Микро | 1 | 2 | 4 | 8 | 16 | 32 | 64 | 128 |
2) Зогсоолын одоогийн тохиргоо
Энэ зорилгоор SW4 ашигладаг.OFF гэдэг нь зогсолтын гүйдэл нь сонгосон динамик гүйдлийн тал, ON нь сонгосон динамик гүйдэлтэй ижил байхаар тохируулагдсан гэсэн үг юм.
3) Гаралтын гүйдлийн тохиргоо:
DIP шилжүүлэгчийн эхний гурван бит (SW 1, 2, 3) нь динамик гүйдлийг тохируулахад ашиглагддаг.Тохиргоо сонгоно уу
Таны моторын шаардлагатай гүйдэлд хамгийн ойр
| SW1 | SW2 | SW3 | ОРгил | RMS |
| ON | ON | ON | 0.44 А | 0.31 А |
| Унтраах | ON | ON | 0.62 А | 0.44 А |
| ON | Унтраах | ON | 0.74 А | 0.52 А |
| Унтраах | Унтраах | ON | 0.86 А | 0.61 А |
| ON | ON | Унтраах | 1.46 А | 1.03 А |
| Унтраах | ON | Унтраах | 1.69 А | 1.20 А |
| ON | Унтраах | Унтраах | 2.14 А | 1.51 А |
| Унтраах | Унтраах | Унтраах | 2.83 А | 2.00 А |
4) Хагас урсгалын функц:
Хагас урсгалын функц нь 200 мс-ээс хойш алхамын импульс байхгүй, драйверын гаралтын гүйдэл автоматаар нэрлэсэн гаралтын гүйдлийн 40% хүртэл буурдаг бөгөөд энэ нь хөдөлгүүрийн халалтыг зогсооход ашиглагддаг.
4. Мотор ба хүч чадлын зүү:
| Мотор ба цахилгаан зүү | 1 | A+ | Моторын утас | |
| 2 | A- | |||
| 3 | B+ | |||
| 4 | B- | |||
| 5,6 | DC+ DC- | Цахилгаан хангамж | Цахилгаан хангамж: DC12-36VDC Оролтын оргил гүйдэл нь 2А хүртэл байж болохгүй |
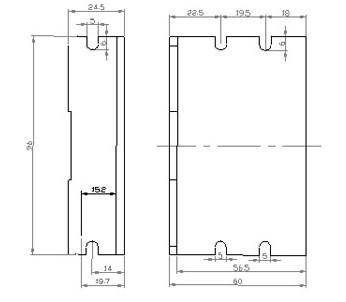
5. Механик үзүүлэлт:
Эргэн тойронд 20 мм зайтай байхын тулд бусад халаалтын төхөөрөмжийн хажууд байрлуулах боломжгүй.Үүнээс гадна тоос шороо, газрын тосны манан, идэмхий хий, хүнд чийгшил, өндөр чичиргээнээс зайлсхий.(нэгж=мм)
6. Алдааг олж засварлах тохируулга
1) , гэрлийн заалт дээрх төлөв
PWR: ногоон, ердийн ажлын гэрэл.
ALM: улаан, эвдрэлийн гэрэл, фазын богино холболт, хэт хүчдэл, бага хүчдэлийн хамгаалалттай мотор.
2) Асуудал
| Сэрүүлгийн заагч | Шалтгаан | Арга хэмжээ |
| LED унтарна | Эрчим хүчний буруу холболт | Цахилгааны утсыг шалгана уу |
| Эрчим хүчний хувьд бага хүчдэл | Эрчим хүчний хүчдэлийг нэмэгдүүлэх | |
| Мотор нь эргүүлэх хүчийг барихгүйгээр ажиллахгүй | Stepper моторын буруу холболт | Түүний утсыг засах |
| RESET дохио нь офлайн үед үр дүнтэй байдаг | RESET-ийг үр дүнгүй болгох | |
| Мотор ажиллахгүй, гэхдээ бариулын моментыг барьдаг | Оролтын импульсийн дохио байхгүй | PMW болон дохионы түвшинг тохируулна уу |
| Мотор буруу чиглэлд ажилладаг | Буруу утаснуудын холболт | Холболтыг 2 утасны аль нэгнийх нь хувьд өөрчил |
| Оролтын чиглэлийн дохио буруу байна | Чиглэлийн тохиргоог өөрчлөх | |
| Моторын барих момент хэтэрхий бага байна | Одоогийн тохиргоотой харьцуулахад хэтэрхий бага байна | Зөв нэрлэсэн одоогийн тохиргоо |
| Хурдатгал хэт хурдан байна | Хурдатгалыг багасгах | |
| Мотор лангуу | Механик эвдрэлийг үгүйсгэх | |
| Жолооч нь мотортой таарахгүй байна | Тохиромжтой драйвераа солино уу |
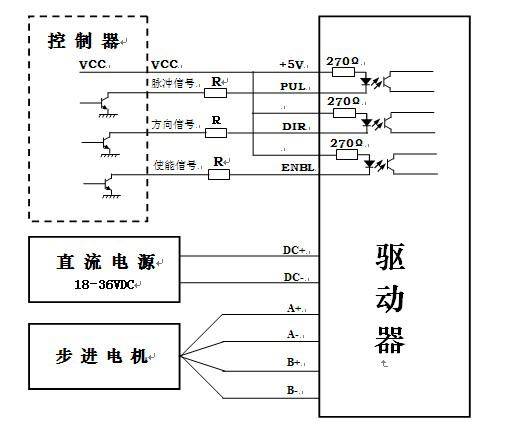
7. Жолоочийн утас
Stepper моторын хяналтын иж бүрэн систем нь алхам алхмаар хөтчүүд, тогтмол гүйдлийн тэжээлийн хангамж, хянагч (импульсийн эх үүсвэр) агуулсан байх ёстой.Дараах нь ердийн системийн холболтын диаграм юм