Introduzione:
DM420A è un tipo di driver per motore passo-passo ibrido bifase, la cui tensione di comando va da 12 V CC a 36 V CC.È progettato per l'uso con motori passo-passo ibridi bifase di tutti i tipi con diametro esterno da 20 mm a 42 mm e corrente di fase inferiore a 2,0 A.Questo circuito adottato è simile al circuito di servocontrollo che consente al motore di funzionare senza intoppi quasi senza rumore e vibrazioni.Anche la coppia di torsione quando il DM420A funziona ad alta velocità è significativamente più elevata rispetto all'altro driver a due fasi, inoltre, anche la precisione di posizionamento è maggiore.È ampiamente utilizzato in dispositivi di controllo numerico di medie e grandi dimensioni come macchine curvatrici, macchine CNC e macchine da ricamo computerizzate, macchine imballatrici e così via.
Caratteristiche:
l Alte prestazioni, prezzo basso
l Controllo della corrente media, azionamento della corrente di uscita sinusoidale bifase
l Tensione di alimentazione da 12VDC a 36VDC
l I/O di segnale optoisolati
l Protezione da sovratensione, sottotensione, sovracorrezione, cortocircuito di fase
l Suddivisione in 8 canali e riduzione automatica della corrente di riposo
l Impostazione della corrente di fase in uscita a 8 canali
l Terminale di input dei comandi offline
l La coppia del motore è correlata alla velocità, ma non al passo/giro
l Alta velocità di avvio
l Coppia elevata ad alta velocità
Specifiche elettriche:
| Tensione di ingresso | 12-36 V CC |
| Corrente in ingresso | < 2A |
| Corrente di uscita | 0,44 A-2,83 A |
| Consumo | Consumo:40 W; |
| Temperatura | Temperatura di lavoro -10~45℃;Temperatura di stoccaggio -40℃~70℃ |
| Umidità | Nessuna condensa, nessuna goccia d'acqua |
| gas | Divieto di gas combustibili e polveri conduttrici |
| peso | 70G |
Assegnazione e descrizione dei pin:
1) Configurazioni dei pin del connettore
| Funzione perno | Dettagli |
| PUL+,PUL- | Segnale a impulsi, PUL+ è l'estremità positiva del pin di ingresso degli impulsi. PUL- è l'estremità negativa del pin di ingresso degli impulsi |
| DIR+,DIR- | Segnale DIR: DIR+ è l'estremità positiva del pin di ingresso della direzione.DIR- è l'estremità negativa del pin di ingresso della direzione |
| ENBL+ | Segnale di abilitazione: ENBL+ è l'estremità positiva del pin di ingresso della direzione.Questo segnale viene utilizzato per abilitare/disabilitare il driver.Livello alto per abilitare il conducente e livello basso per disabilitarlo. |
| ENBL- | ENBL- è l'estremità negativa del pin di ingresso della direzione.Solitamente lasciato non connesso (abilitato) |
2) Schema elettrico dei pin:
I segnali di controllo del PC possono essere attivi a livello elettrico alto e basso.Quando il livello elettrico alto è attivo, tutti i segnali negativi di controllo saranno collegati insieme a GND.Quando il livello elettrico basso è attivo, tutti i segnali positivi di controllo saranno collegati insieme alla porta pubblica.Ora fornisci due esempi (Open Collector e PNP), controllali:

Fig 1. Circuito della porta di ingresso (connessione positiva)
Uscita connettore aperto del PC
Fig. 2 Circuito della porta di ingresso (connessione negativa)
Uscita PNP del PC
Nota: quando VCC=5V, R=0
Quando VCC=12V, R=1K, >1/8W
Quando VCC=24V, R=2K,>1/8W
R deve essere collegato nella parte del segnale di controllo.
3.Scelta della funzione (utilizzo dei pin DIP per ottenere questa funzione)
1) La risoluzione del micropasso è impostata dal SW 5,6,7,8 del DIP switch come mostrato nella tabella seguente:
| SW5 | ON | SPENTO | ON | SPENTO | ON | SPENTO | ON | SPENTO |
| SW6 | ON | ON | SPENTO | SPENTO | ON | ON | SPENTO | SPENTO |
| SW7 | ON | ON | ON | ON | SPENTO | SPENTO | SPENTO | SPENTO |
| Impulsi/giro | 200 | 400 | 800 | 1600 | 3200 | 6400 | 12800 | 25600 |
| Micro | 1 | 2 | 4 | 8 | 16 | 32 | 64 | 128 |
2) Impostazione della corrente di arresto
SW4 viene utilizzato a questo scopo.OFF significa che la corrente di arresto è impostata su metà della corrente dinamica selezionata e ON significa che la corrente di arresto è impostata su uguale alla corrente dinamica selezionata.
3) Impostazione della corrente di uscita:
I primi tre bit (SW 1, 2, 3) del DIP switch vengono utilizzati per impostare la corrente dinamica.Seleziona un'impostazione
Il più vicino possibile alla corrente richiesta dal tuo motore
| SW1 | SW2 | SW3 | PICCO | RMS |
| ON | ON | ON | 0,44 A | 0,31 A |
| SPENTO | ON | ON | 0,62 A | 0,44 A |
| ON | SPENTO | ON | 0,74 A | 0,52 A |
| SPENTO | SPENTO | ON | 0,86 A | 0,61 A |
| ON | ON | SPENTO | 1,46 A | 1,03 A |
| SPENTO | ON | SPENTO | 1,69 A | 1,20 A |
| ON | SPENTO | SPENTO | 2.14 A | 1,51 A |
| SPENTO | SPENTO | SPENTO | 2,83 A | 2:00 |
4) Funzione semiflusso:
La funzione semi-flusso prevede che non vi sia impulso di passo dopo 200 ms, la corrente di uscita del driver viene ridotta automaticamente al 40% della corrente di uscita nominale, che viene utilizzata per prevenire il surriscaldamento del motore.
4. Perni del motore e dell'alimentazione:
| Pin del motore e dell'alimentazione | 1 | A+ | Cablaggio motori | |
| 2 | A- | |||
| 3 | B+ | |||
| 4 | B- | |||
| 5,6 | CC+ CC- | Alimentazione elettrica | Alimentazione: DC12-36VDCLa corrente di ingresso di picco non può essere fino a 2A |
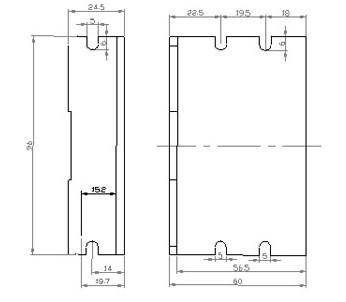
5. Specifiche meccaniche:
Per avere 20mm di spazio intorno non può essere posizionato accanto ad altri dispositivi di riscaldamento.Inoltre, evita polvere, nebbia d'olio, gas corrosivo, forte umidità e vibrazioni elevate.(Unità=mm)
6. Regolazione della risoluzione dei problemi
1), lo stato sull'indicazione della luce
PWR: verde, luce di lavoro normale.
ALM: rosso, spia di guasto, motore con protezione da cortocircuito di fase, sovratensione e sottotensione.
2) Problemi
| Indicatore di allarme | Motivi | Le misure |
| LED spento | Collegamento errato per l'alimentazione | Controllare il cablaggio di alimentazione |
| Basse tensioni per l'alimentazione | Aumentare la tensione di alimentazione | |
| Il motore non funziona senza mantenere la coppia | Collegamento errato del motore passo-passo | Correggerne il cablaggio |
| Il segnale RESET è efficace quando offline | Rendere RESET inefficace | |
| Il motore non funziona, ma mantiene la coppia di tenuta | Senza segnale di impulso in ingresso | Regola il PMW e il livello del segnale |
| Il motore gira nella direzione sbagliata | Collegamento dei fili errato | Modificare la connessione per uno qualsiasi dei 2 fili |
| Segnale di direzione in ingresso errato | Modificare l'impostazione della direzione | |
| La coppia di tenuta del motore è troppo piccola | Troppo piccolo rispetto all'impostazione attuale | Impostazione corretta della corrente nominale |
| L'accelerazione è troppo veloce | Ridurre l'accelerazione | |
| Il motore si ferma | Escludere guasti meccanici | |
| Il driver non corrisponde al motore | Cambia un driver adatto |
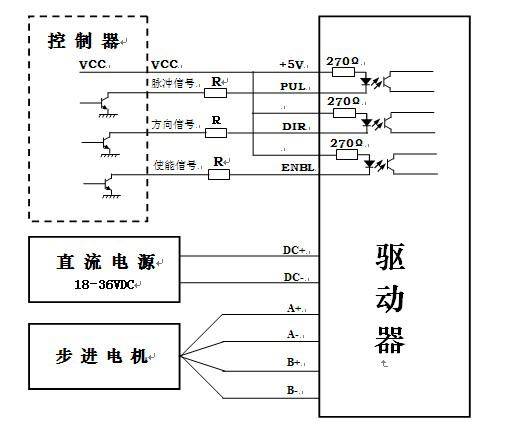
7. Cablaggio del driver
Un sistema di controllo completo del motore passo-passo dovrebbe contenere azionamenti passo-passo, alimentazione CC e controller (sorgente di impulsi).Quello che segue è un tipico schema elettrico del sistema