Introducere:
DM420A este un tip de driver de motor pas cu pas hibrid cu două faze, a cărui tensiune de acționare este de la 12VDC la 36VDC.Este conceput pentru a fi utilizat cu motoare pas cu pas hibride cu 2 faze de toate tipurile, cu un diametru exterior de 20 mm până la 42 mm și un curent de fază mai mic de 2,0 A.Acest circuit pe care îl adoptă este similar cu circuitul de control servo care permite motorului să funcționeze fără probleme aproape fără zgomot și vibrații.Cuplul de hording atunci când DM420A rulează la viteză mare este, de asemenea, semnificativ mai mare decât celălalt driver cu două faze, în plus, precizia de poziționare este, de asemenea, mai mare.Este utilizat pe scară largă în dispozitivele de control numeric de dimensiuni medii și mari, cum ar fi mașina de curbare, mașina CNC și mașina de brodat computerizată, mașinile de ambalat și așa mai departe.
Caracteristici:
l Performanță ridicată, preț scăzut
l Controlul curentului mediu, controlul curentului de ieșire sinusoidal cu 2 faze
l Tensiune de alimentare de la 12VDC la 36VDC
l I/O semnal optoizolat
l Protecție la supratensiune, subtensiune, supracorectă, scurtcircuit de fază
l Subdiviziune cu 8 canale și reducere automată a curentului în gol
l Setarea curentului de fază de ieșire pe 8 canale
l Terminalul de introducere a comenzii offline
l Cuplul motorului este legat de turație, dar nu este legat de pas/revoluție
l Viteză mare de pornire
l Cuplu de hording mare la viteză mare
Specificații electrice:
| Tensiune de intrare | 12-36VDC |
| Curentul de intrare | < 2A |
| Curent de ieșire | 0,44A-2,83A |
| Consum | Consum:40W; |
| Temperatura | Temperatura de lucru -10~45℃; Temperatura de stocare -40℃~70℃ |
| Umiditate | Fără condens, fără picături de apă |
| gaz | Interzicerea gazelor combustibile și a prafului conductiv |
| greutate | 70G |
Atribuțiile și descrierea pinurilor:
1) Configurații pini conector
| Funcția Pin | Detalii |
| PUL +,PUL- | Semnal de impuls, PUL+ este capătul pozitiv al pinului de intrare a impulsurilor PUL- este capătul negativ al pinului de intrare a impulsurilor |
| DIR+,DIR- | Semnal DIR: DIR+ este capătul pozitiv al pinului de intrare a direcției DIR- este capătul negativ al pinului de intrare a direcției |
| ENBL+ | Semnal de activare: ENBL+ este capătul pozitiv al pinului de intrare de direcție.Acest semnal este utilizat pentru activarea/dezactivarea driverului.Nivel înalt pentru activarea șoferului și nivel scăzut pentru dezactivarea șoferului. |
| ENBL- | ENBL- este capătul negativ al pinului de intrare a direcției.De obicei lăsat neconectat (activat) |
2) Schema de conexiuni pini:
Semnalele de control ale PC-ului pot fi active la nivel electric ridicat și scăzut.Când nivelul electric ridicat este activ, toate semnalele negative de control vor fi conectate împreună la GND.Când nivelul electric scăzut este activ, toate semnalele pozitive de control vor fi conectate împreună la portul public.Dați acum două exemple (Colector deschis și PNP), vă rugăm să le verificați:

Fig 1. Circuitul portului de intrare (conexiune pozitivă)
Ieșire conector deschis PC
Fig. 2 Circuitul portului de intrare (conexiune negativă)
Ieșire PC PNP
Notă: Când VCC=5V, R=0
Când VCC=12V, R=1K, >1/8W
Când VCC=24V, R=2K,>1/8W
R trebuie să se conecteze în partea semnalului de control.
3. Alegerea funcției (folosind pinii DIP pentru a realiza această funcție)
1) Rezoluția în micro trepte este setată de SW 5,6,7,8 ale comutatorului DIP, așa cum se arată în următorul tabel:
| SW5 | ON | OFF | ON | OFF | ON | OFF | ON | OFF |
| SW6 | ON | ON | OFF | OFF | ON | ON | OFF | OFF |
| SW7 | ON | ON | ON | ON | OFF | OFF | OFF | OFF |
| Puls/tur | 200 | 400 | 800 | 1600 | 3200 | 6400 | 12800 | 25600 |
| Micro | 1 | 2 | 4 | 8 | 16 | 32 | 64 | 128 |
2) Setarea curentului de oprire
SW4 este utilizat în acest scop.OFF, ceea ce înseamnă că curentul de oprire este setat să fie jumătate din curentul dinamic selectat și ON înseamnă că oprirea este setat să fie același cu curentul dinamic selectat.
3) Setarea curentului de ieșire:
Primii trei biți (SW 1, 2, 3) ai comutatorului DIP sunt utilizați pentru a seta curentul dinamic.Selectați o setare
Cel mai apropiat de curentul necesar motorului dumneavoastră
| SW1 | SW2 | SW3 | VÂRF | RMS |
| ON | ON | ON | 0,44 A | 0,31 A |
| OFF | ON | ON | 0,62 A | 0,44 A |
| ON | OFF | ON | 0,74 A | 0,52 A |
| OFF | OFF | ON | 0,86 A | 0,61 A |
| ON | ON | OFF | 1,46 A | 1,03 A |
| OFF | ON | OFF | 1,69 A | 1,20 A |
| ON | OFF | OFF | 2,14 A | 1,51 A |
| OFF | OFF | OFF | 2,83 A | 2.00 A |
4) Funcția de semi-flux:
Funcția de semi-flux este că nu există un impuls de pas după 200 ms, curentul de ieșire a driverului redus automat la 40% din curentul de ieșire nominal, care este utilizat pentru a preveni căldura motorului.
4. Știfturi de motor și putere:
| Pini motor și putere | 1 | A+ | Cablajul motoarelor | |
| 2 | A- | |||
| 3 | B+ | |||
| 4 | B- | |||
| 5,6 | DC+ DC- | Alimentare electrică | Alimentare: DC12-36VDC Curentul de intrare maxim nu poate fi de până la 2A |
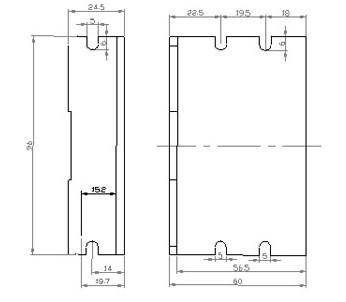
5. Specificații mecanice:
Pentru a avea 20 mm de spațiu în jur, nu poate fi plasat lângă alte dispozitive de încălzire.În plus, evitați praful, ceața de ulei, gazele corozive, umiditatea puternică și vibrațiile ridicate.(Unitate=mm)
6. Reglarea depanării
1) , starea pe indicarea luminii
PWR: verde, lumină de lucru normală.
ALM: roșu, lumină de eroare, motor cu protecție la scurtcircuit de fază, supratensiune și subtensiune.
2) Probleme
| Indicator de alarma | Motive | Măsuri |
| LED-ul se stinge | Conexiune greșită pentru alimentare | Verificați cablajul de alimentare |
| Tensiuni joase pentru putere | Măriți tensiunea de putere | |
| Motorul nu merge, fara a mentine cuplul | Conexiune greșită a motorului pas cu pas | Corectează-i cablajul |
| Semnalul RESET este eficient când este offline | Faceți RESET ineficient | |
| Motorul nu funcționează, dar menține cuplul de menținere | Fără semnal de impuls de intrare | Reglați PMW și nivelul semnalului |
| Motorul merge in directia gresita | Conexiune greșită a firelor | Schimbați conexiunea pentru oricare dintre cele 2 fire |
| Semnal de direcție de intrare greșit | Schimbați setarea direcției | |
| Cuplul de reținere al motorului este prea mic | Prea mic în raport cu setarea curentă | Setarea corectă a curentului nominal |
| Accelerația este prea rapidă | Reduceți accelerația | |
| Motoarele se blochează | Excludeți defecțiunea mecanică | |
| Driverul nu se potrivește cu motorul | Schimbați un driver potrivit |
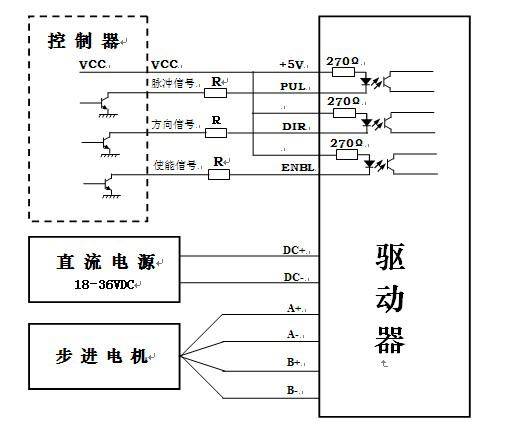
7. Cablajul șoferului
Un sistem complet de control al motorului pas cu pas trebuie să conțină unități de acţionare pas cu pas, sursă de alimentare CC și controler (sursă de impulsuri).Următoarea este o diagramă tipică de cablare a sistemului