



معرفی:
DM860A نوعی درایور موتور پله ای هیبریدی دو فاز است که ولتاژ محرک آن از 24 ولت تا 80 ولت است.این برای استفاده با موتورهای پله ای هیبریدی 2 فاز از همه نوع با قطر خارجی 57 تا 110 میلی متر و جریان فاز کمتر از 8.0 آمپر طراحی شده است.این مداری که اتخاذ می کند شبیه مدار کنترل سروو است که موتور را قادر می سازد تقریباً بدون نویز و لرزش به آرامی کار کند.گشتاور هوردینگ هنگامی که DM860A تحت سرعت بالا کار می کند نیز به طور قابل توجهی بالاتر از درایور دو فاز دیگر است، علاوه بر این، دقت موقعیت یابی نیز بالاتر است.این به طور گسترده ای در دستگاه های کنترل عددی اندازه متوسط و بزرگ مانند دستگاه منحنی، دستگاه CNC و دستگاه گلدوزی رایانه، دستگاه های بسته بندی و غیره استفاده می شود.
امکانات:
عملکرد بالا، قیمت پایین
کنترل جریان متوسط، درایو جریان خروجی سینوسی 2 فاز
ولتاژ تغذیه از 24VDC تا 80VDC
ورودی/خروجی سیگنال اپتو ایزوله
حفاظت اضافه ولتاژ، تحت ولتاژ، بیش از حد صحیح، حفاظت از اتصال کوتاه فاز
تقسیم 14 کانال و کاهش خودکار جریان بیکار
تنظیم جریان فاز خروجی 8 کانال
ترمینال ورودی دستور آفلاین
گشتاور موتور با سرعت مرتبط است، اما با گام/دوران ارتباطی ندارد
سرعت شروع بالا
گشتاور hording بالا تحت سرعت بالا
مشخصات برق:
| ولتاژ ورودی | 24-80VDC |
| جریان ورودی | < 6A |
| جریان خروجی | 2.8A~7.8A |
| مصرف | مصرف: 80 وات؛ بیمه داخلی:10A |
| درجه حرارت | دمای کاری -10 تا 45 درجه سانتیگراد، دمای ذخیره -40 تا 70 درجه سانتیگراد |
| رطوبت | بدون تراکم، بدون قطرات آب |
| گاز | ممنوعیت گازهای قابل احتراق و گرد و غبار رسانا |
| وزن | 500 گرم |
پین تکالیف و توضیحات:
1) پیکربندی پین های رابط
| عملکرد پین | جزئیات |
| PUL +، PUL- | سیگنال پالس، PUL+ انتهای مثبت پین ورودی پالس است PUL- انتهای منفی پین ورودی پالس است. |
| DIR+,DIR- | سیگنال DIR: DIR+ انتهای مثبت پین ورودی جهت استDIR- انتهای منفی پایه ورودی جهت است. |
| ENBL+ | سیگنال فعال: ENBL+ انتهای مثبت پین ورودی جهت است.این سیگنال برای فعال/غیرفعال کردن درایور استفاده می شود.سطح بالا برای فعال کردن درایور و سطح پایین برای غیرفعال کردن درایور. |
| ENBL- | ENBL- انتهای منفی پین ورودی جهت است.معمولاً بدون اتصال رها می شود (فعال) |
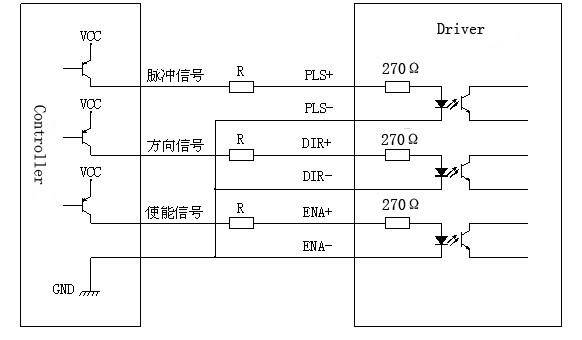
2) نمودار سیم کشی پین ها:
سیگنال های کنترل رایانه شخصی می توانند در سطح الکتریکی بالا و پایین فعال باشند.هنگامی که سطح الکتریکی بالا فعال است، تمام سیگنال های منفی کنترل با هم به GND متصل می شوند.هنگامی که سطح الکتریکی پایین فعال است، تمام سیگنال های مثبت کنترل با هم به پورت عمومی متصل می شوند.اکنون دو مثال بزنید (مجموعه باز و PNP)، لطفاً آنها را بررسی کنید:

شکل 1. مدار پورت ورودی (اتصال یانگ)
خروجی کانکتور باز کامپیوتر
شکل 2 مدار پورت ورودی (اتصال یین)
خروجی PNP کامپیوتر
توجه: وقتی VCC=5V، R=0
وقتی VCC=12V، R=1K، >1/8W
وقتی VCC = 24 ولت، R = 2K، 1/8 وات
R باید در قسمت سیگنال کنترل وصل شود.
3. انتخاب تابع (استفاده از پین های DIP برای دستیابی به این عملکرد)
1) رزولوشن Micro Step توسط SW 5,6,7,8 سوئیچ DIP همانطور که در جدول زیر نشان داده شده است تنظیم می شود:
| SW5 | ON | خاموش | ON | خاموش | ON | خاموش | ON | خاموش | ON | خاموش | ON | خاموش | ON | خاموش | خاموش |
| SW6 | ON | ON | خاموش | خاموش | ON | ON | خاموش | خاموش | ON | ON | خاموش | خاموش | ON | ON | خاموش |
| SW7 | ON | ON | ON | ON | خاموش | خاموش | خاموش | خاموش | ON | ON | ON | ON | خاموش | خاموش | خاموش |
| SW8 | ON | ON | ON | ON | ON | ON | ON | ON | خاموش | خاموش | خاموش | خاموش | خاموش | خاموش | ON |
| PULSE/REV | 400 | 800 | 1600 | 3200 | 6400 | 12800 | 25600 | 51200 | 1000 | 2000 | 5000 | 10000 | 25000 | 50000 | 51200 |
2) تنظیم جریان سکون
برای این منظور از SW4 استفاده می شود.OFF به این معنی که جریان سکون نصف جریان دینامیکی انتخاب شده و ON به این معنی است که سکون همان جریان دینامیکی انتخاب شده است.
3) تنظیم جریان خروجی:
سه بیت اول (SW 1, 2, 3) DIP سوئیچ برای تنظیم جریان دینامیکی استفاده می شود.یک تنظیم را انتخاب کنید
نزدیکترین جریان به جریان مورد نیاز موتور شما
| جریان خروجی (A) | ||||
| SW1 | SW2 | SW3 | اوج | RMS |
| ON | ON | ON | 2.80 | 2.00 |
| خاموش | ON | ON | 3.50 | 2.50 |
| ON | خاموش | ON | 4.20 | 3.00 |
| خاموش | خاموش | ON | 4.90 | 3.50 |
| ON | ON | خاموش | 5.70 | 4.00 |
| خاموش | ON | خاموش | 6.40 | 4.60 |
| ON | خاموش | خاموش | 7.00 | 5.00 |
| خاموش | خاموش | خاموش | 7.80 | 5.60 |
4) تابع نیمه جریان:
عملکرد نیمه جریان این است که پس از 200 میلی ثانیه پالس پله ای وجود ندارد، جریان خروجی راننده به طور خودکار به 40٪ جریان خروجی نامی کاهش می یابد که برای جلوگیری از ساعت موتور استفاده می شود.
4. پین های موتور و قدرت:
| پین موتور و پاور | 1 | A+ | سیم کشی موتورها | |
| 2 | A- | |||
| 3 | B+ | |||
| 4 | B- | |||
| 5،6 | DC+ DC- | منبع تغذیه | منبع تغذیه :DC24-80VDC حداکثر جریان ورودی نمی تواند تا 6A برسد |
5. مشخصات مکانیکی:
برای داشتن 20 میلی متر فضای اطراف، نمی توان آن را در کنار سایر وسایل گرمایشی قرار داد.علاوه بر این، از گرد و غبار، غبار روغن، گاز خورنده، رطوبت زیاد و لرزش زیاد اجتناب کنید.(واحد = میلی متر)
عکس 3
6. تنظیم عیب یابی
1) وضعیت در نشانگر نور
PWR: سبز، چراغ کار معمولی.
ALM: قرمز، چراغ خرابی، موتور با اتصال کوتاه فاز، ولتاژ بیش از حد و محافظت در برابر ولتاژ پایین.
2) مشکلات
| نشانگر هشدار | دلایل | معیارهای |
| خاموش شدن LED | اتصال اشتباه برای برق | سیم کشی برق را بررسی کنید |
| ولتاژ پایین برای برق | ولتاژ برق را بزرگ کنید | |
| موتور بدون نگه داشتن گشتاور کار نمی کند | اتصال اشتباه استپر موتور | سیم کشی آن را اصلاح کنید |
| سیگنال RESET در حالت آفلاین موثر است | RESET را بی اثر کنید | |
| موتور کار نمی کند، اما گشتاور را حفظ می کند | بدون سیگنال پالس ورودی | PMW و سطح سیگنال را تنظیم کنید |
| موتور جهت اشتباه حرکت می کند | اتصال سیم ها اشتباه است | اتصال هر یک از 2 سیم را تغییر دهید |
| سیگنال جهت ورودی اشتباه است | تغییر تنظیمات جهت | |
| گشتاور نگهدارنده موتور خیلی کم است | نسبت به تنظیمات فعلی خیلی کوچک است | تنظیم جریان نامی صحیح |
| شتاب خیلی سریع است | شتاب را کم کنید | |
| غرفه های موتور | خرابی مکانیکی را رد کنید | |
| درایور با موتور مطابقت ندارد | درایور مناسب را تغییر دهید |
7. سیم کشی درایور
یک سیستم کنترل کامل استپر موتور باید شامل درایوهای پله ای، منبع تغذیه DC و کنترل کننده (منبع پالس) باشد.شکل زیر یک نمودار سیم کشی معمولی سیستم است
8.ضمیمه
دوازده ماه گارانتی محدود
موتور LONGS.محصولات خود را در برابر نقص در مواد و طرز کار به مدت 12 ماه پس از ارسال به خارج از کارخانه ضمانت می کند. در طول دوره گارانتی، LONGS MOTOR یا به صورت اختیاری، محصولاتی را که معیوب بودن آنها ثابت شده است، تعمیر یا جایگزین می کند.
محرومیت ها
ضمانت نامه فوق شامل هیچ محصولی نمی شود که به دلیل استفاده نادرست یا ناکافی توسط مشتری، سیم کشی نامناسب یا ناکافی مشتری، تغییر غیرمجاز یا سوء استفاده یا عملکرد فراتر از مشخصات الکتریکی محصول و/یا عملکرد فراتر از مشخصات محیطی محصول آسیب دیده باشد. .
دریافت خدمات گارانتی
برای دریافت خدمات گارانتی، شماره مجوز مواد برگشتی (RMA) باید از خدمات مشتری در ایمیل دریافت شود:longsmotor@hotmail.com. قبل از بازگرداندن محصول برای خدمات.مشتری باید هزینه حمل و نقل محصولات بازگردانده شده به LONGS MOTOR را برای خدمات گارانتی پرداخت کند و LONGS MOTOR باید هزینه بازگرداندن محصولات به مشتری را بپردازد.
محدودیت های گارانتی
LONGS MOTOR هیچ ضمانت دیگری اعم از صریح یا ضمنی در رابطه با محصول نمی دهد.LONGS MOTOR به طور خاص ضمانتهای ضمنی خرید و فروش و تناسب برای یک هدف خاص را رد میکند.برخی از حوزههای قضایی محدودیتهایی را در مورد مدت زمان و مدت زمان ضمانت ضمنی اجازه نمیدهند. بنابراین محدودیت یا استثناء فوق ممکن است برای شما اعمال شود، با این حال، هر گونه ضمانت ضمنی خرید و فروش یا تناسب اندام محدود به مدت ۱۲ ماهه این ضمانت نامه کتبی است.




